
⛔️ You're at a 30% increased risk of accidents and injuries when you drive under severe low visibility conditions. But what if your car could talk to other cars and see what they're seeing? Would that lower your chance of hitting someone or being hit? You might be thinking yes it would help but what if the other cars also had equally bad visibility?
🤖 Tesla uses a single giant neural network known as a “transformer” receiving input from eight cameras at once but essentially, all those cameras are mounted on one car. What would be the likelihood of accidents if this Tesla could talk to another one coming from the right at a signal-free intersection?
🚘 Background
Tesla uses deep neural networks to train their self-driving cars, specifically convolutional neural networks, which they explained in a three-hour presentation on Tesla day. It requires large amounts of labeled data that is fed into these networks for training. Tesla uses a team of engineers to label the data manually, which they use in combination with other data that is labeled automatically. Tesla even dropped radars from their cars because they are relying more and more on Tesla Vision, their camera-based autopilot system.
🎥 Essential Point of Contention
Would a camera-centric autopilot system benefit from talking to other cars in the vicinity? The idea stemmed from my most recently published research paper. It's called Partially Cooperative Scalable Spectrum Sensing in Cognitive Radio Networks under SDF attacks, and it is published in IEEE Internet of things Journal. The idea is very simple and I actually used the analogy of reserved traffic lanes to explain the concept in a YouTube video.
It was the use of that analogy that got me thinking that the same idea actually applies to self-driving cars.
🚥 What If They Could Talk
Imagine you're driving in extremely poor visibility conditions and it's very hard to tell if there is another car or bike or anything at a crossing or right ahead of you. Let's say your car has a 20% chance of making the wrong judgment and hitting the object. Could this risk be reduced if your car could communicate with other cars next to you and see what their observation is? Keep in mind that the other cars also face the same low visibility issue and have a 20% chance of thinking that the road is clear when there is actually another vehicle there.
💡 But Does it Actually Help?
In my paper, I used this very simple idea of majority voting to make spectrum sensing more accurate, and I think the same applies here because the math behind the decision-making is the same. Every car has a 20% chance of incorrect detection, which includes both missing an object, and thinking an object is there when it's not.
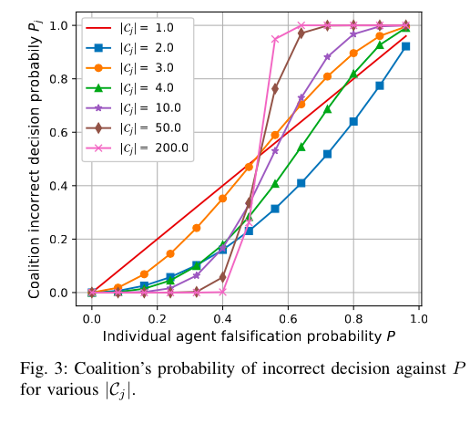
On the horizontal axis, you can see the probability of the individual cars making an incorrect decision, (which in our case, is 0.2). On the vertical axis, you see the probability of an incorrect decision after a majority vote. The different colors represent the group size or the number of cars talking to each other and sharing their observation.
🚗 🚙 Think of it like this, if there are 5 cars observing the same spot and want to make a decision about whether it's empty and safe to proceed or there is another vehicle there. Two of them make a poor judgment and think it’s empty, but the three others make a correct judgment, the majority vote will still stop the two cars from running into an accident.
⚡️ It's a very simple yet powerful idea. And I used it in my paper to make decisions about spectrum occupancy. In my paper, several IoT devices need to check if the radio spectrum is vacant before they can transmit their data, but their individual sensing results can be inaccurate. 🌫 The low visibility conditions that impair the judgment of cars represent the inherent inaccuracies in the spectrum sensing process as well as the attacks on the network where some bad guys intentionally falsify the sensing results of others. I used a majority vote to make spectrum sensing more reliable, and the same can be applied to self-driving cars in the future. We can achieve as much as a 10% reduction in accidents related to low visibility conditions if we apply this idea of collaboration to self-driving cars.
💬 I'm sure whatever your field is, you can identify one application of the majority to a problem in your field. Off the top of my head, I can think of dental x-rays or some other medical tests where the process of detection can be somewhat vague or uncertain. What's your field, and how could you apply a majority vote in it? Let me know. And if you would like to know more about how I’m using machine learning in my daily life in home IoT projects, follow me on Twitter.
❤My Favourite Things
🎬YouTube Video:
I love planning for my day, week, month, and year much more than actually sticking to the plan. I watched this video about “Planning Fallacy” this week and it gave me a lot of insights into why I fail to stick to my plans despite having a clear plan for the entire week. I hope you find something useful in this video too.
📕Book:
I’m really enjoying listening to Elantris on my iPad. The book is not actually an audiobook but I usually turn every pdf or epub into an audiobook and then fall asleep listening to it. This book is awesome but super long so you won’t be hearing about my book review of it anytime soon. Better start reading it yourself.
📝Quote:
“You only live once, but if you do it right, once is enough.” Mae West
I see that you’ve made it to the end. If you liked this blog post, check out the other stuff I talk about on my YouTube Channel. Don’t forget to subscribe!😉

